Abstract
One of the standing challenges in multi-robot systems is how to reliably avoid collisions among individual robots without jeopardizing the mission of the system. This is because the existing collision-avoidance techniques are either prone to deadlocks, i.e., the robots may never reach their desired goal position, or computationally intractable, i.e., the solution may not be provided in practical time. We study whether it is possible to design a method for collision avoidance in multi-robot systems that is both deadlock-free and computationally tractable. The central results of our work are 1) the observation that in appropriately structured environments deadlock-free and computationally tractable collision avoidance is, in fact, possible to achieve and 2) consequently we propose practical, yet guaranteed, centralized and decentralized algorithms for collision avoidance in multi-robot systems.
We take the deliberative approach, i.e., coordinated collision-free trajectories are first computed either by a central motion planner or by decentralized negotiation among the robots and then each robot controls its advancement along its planned trajectory. We start by reviewing the existing techniques in both single- and multi-robot motion planning, identify their limitations, and subsequently design new centralized and decentralized trajectory coordination algorithms for different use cases.
Firstly, we prove that a revised version of the classical prioritized planning technique, which may not return a solution in general, is guaranteed to always return a solution in polynomial time under certain conditions that we characterize. Specifically, it is guaranteed to provide a solution if the start and destination of each coordinated robot is an endpoint of a so-called well-formed infrastructure. That is, it can be reliably used in systems where the robots at start and destination positions do not prevent other robots from reaching their goals, which, notably, is a property satisfied in most man-made environments.
Secondly, we design an asynchronous decentralized variant of both classical and revised prioritized planning that can be used to find coordinated trajectories solely by peer-to-peer message passing among the robots. The method inherits guarantees from its centralized version, but can compute the solution faster by exploiting the computational power distributed across multi-robot team.
Thirdly, in contrast to the above algorithms that coordinate robots in a batch, we design a decentralized algorithm that can coordinate the robots in the systems incrementally. That is, the robots may be ordered to relocate at any time during the operation of the system. We prove that if the robots are tasked to relocate between endpoints of a well-formed infrastructure, then the algorithm is guaranteed to always find a collision-free trajectory for each relocation task in quadratic time.
Fourthly, we show that incremental replanning of trajectories of individual robots while they are subject to gradually increasing collision penalty can serve as a powerful heuristic that is able to generate near-optimal solutions.

Finally, we design a novel control law for controlling the advancement of individual robots in the team along their planned trajectories in the presence of delaying disturbances, e.g., humans stepping in the way of robots. While naive control strategies for handling the disturbances may lead to deadlocks, we prove that under the proposed control law, the robots are guaranteed to always reach their destination.
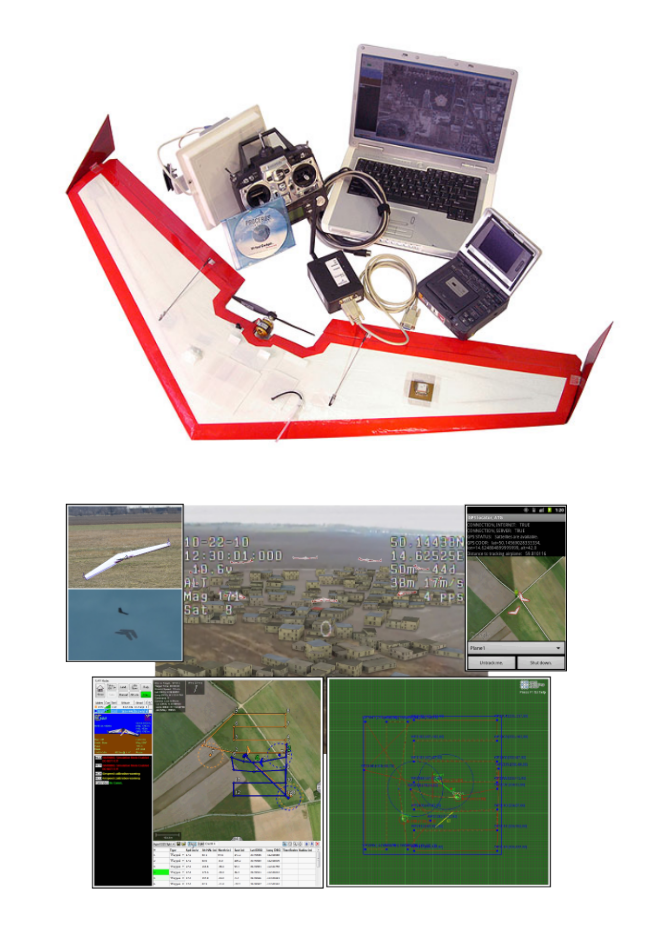
We evaluate the presented techniques both in synthetic simulated environments as well as in real-world field experiments. In simulation experiments with up to 60 robots, we observe that the proposed technique generates shorter motions than state-of-the-art reactive collision avoidance techniques and reliably solves also the instances where reactive techniques fail. Further, unlike many proposed coordination techniques, we validate the assumptions of our algorithms and the consequent practical applicability of our approach by implementing and testing proposed coordination approach in two real-world multi-robot systems. In particular, we successfully deployed and field tested asynchronous decentralized prioritized planning as a collision avoidance mechanism in 1) a Multi-UAV system with fixed-wing unmanned aircraft and 2) an experimental mobility-on-demand system using self-driving golf carts.
![[PDF]](http://michalcap.net/wp-content/plugins/papercite/img/pdf.png) Download as PDF
Download as PDF

{kind=link}